仿生六足蜘蛛机器人项目
在人类探索未知领域的过程中,比如火星探测、受灾现场等, 因六足仿生机器人能够更加稳定的运动,能够广泛运用于各种未 知领域,因此六足机器人的研究变得更加有意义。
机械与土木工程学院徐刘杰在2023“挑战杯”大学生课外学术科技作品大赛中申报了智能仿生蜘蛛机器人,具有部分蜘蛛的生理特点及行进特性,六足机器人的足部与地面接触面积小,这使其寻找着力点更加容易,运动过程更加稳定,能够有效的跨越障碍物。
装置特点
根据机器人学和仿生原理设计出机器人的外观结构,根据Adams 运动学仿真软件进行运动学分析通过扭矩曲线判断选择电机,通过观察多足昆虫行走动作判断出合适行走步态,通过多线程处理帧操作将传出视频更加稳定。
仿真制作
根据仿生原理再与机器人学使用 SOLIDWORKS 三维建模软件设计六足仿生机器 人的模型,通过 Adams 软件进行步态仿真根据仿真数据判断设计模型合理性并根据仿真数据选择合适舵机,仿真无误后将设计出的模型进行打印拼装,设计出控制多路舵机的主控电路,然后完成机器人的外观制作。
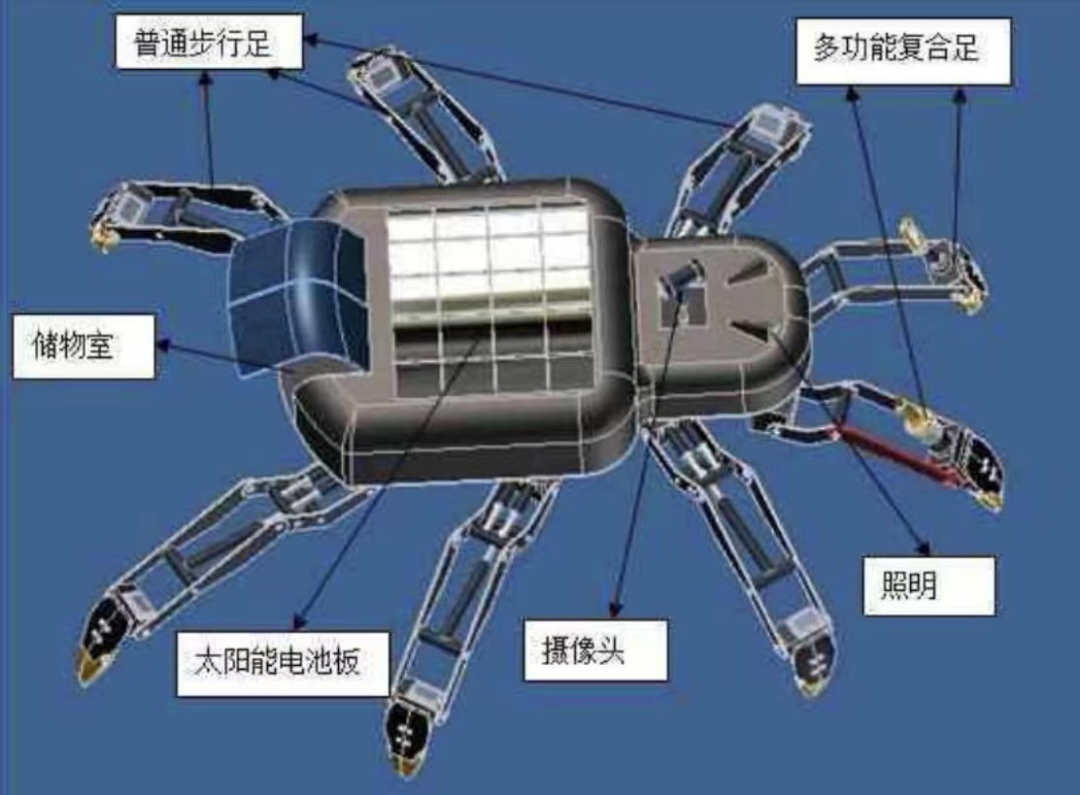
整体结构
蜘蛛机器人主要由躯干和八条腿组。模仿蜘蛛的八条腿的布局方式、设计了如图的装配布局。每条腿都有足够的活动空间、互不干涉。为其运动灵活性提供了可能。其中。后三对腿为普通步行足。一对前腿为多功能复合足。左前腿具有抓取的功能,右前腿具有钻的功能。另外躯干上装有视频、照明、太阳能电池板,躯干尾端留有一个储物空间。
本产品对于复杂地形具有十分强大的适应性。并且在互联网+技术的支持下,可以在不适合大多数履带和轮式机器人运动的环境下平稳地移动,可以更好的适应复杂的环境,准确地完成特殊任务和难以完成的工作,在国防、救灾等工作上有难以替代的意义。
初审:韩凯旭
复审:殷 飞
终审:姚 楠

